
A tomossíntese embora seja um conceito amplamente conhecido, tem se tornado cada vez mais acessível através de equipamentos de raio-x. Capaz de gerar imagens de alta qualidade em variados posicionamentos, além de utilizar esta capacidade de movimento para realizar exames de tomossíntese. Podemos destacar alguns ganhos desta técnica cada vez mais presente:
- Utilizando a tomossíntese se obtém imagens 3D, composta por múltiplos cortes, de boa qualidade com baixa exposição à radiação.
- Sendo uma imagem 3D pode-se gerar planos de visão que seriam difíceis ou impossíveis com as técnicas de raio-X 2D tradicional.
- Reduz os efeitos da sobreposição de tecidos de diferentes densidades, facilitando diagnósticos precoces e mais precisos.
- É um exame muito rápido de ser executado com preparação equivalente a um raio-x tradicional.
Basicamente, o equipamento captura várias imagens de raio-X tradicional (2D) com diferentes posicionamentos. Um modelo 3D do exame é sintetizado a partir destas imagens 2D e da informação do posicionamento de cada captura. O resultado do exame inclui além das várias imagens tradicionais 2D capturadas, uma reconstrução 3D compostas por cortes de espessura configurável. Permitindo a visualização de detalhes obstruídos nas imagens originais.
Evolução dos equipamentos de tomossíntese
A melhoria na capacidade e precisão dos diagnósticos depende da possibilidade de visualizar detalhes. Muitos destes obstruídos ou envolvidos em tecidos de diferentes densidades. Com este objetivo, foram desenvolvidos vários equipamentos e algoritmos para se gerar imagens de tomossíntese em três dimensões (3D).
As imagens de duas dimensões (2D) são constituídas de “pixels” definidos com largura e comprimento e possuem um valor médio para a área correspondente. Os modelos de 3 dimensões são constituídos de “voxels” que possuem também uma altura, ou comumente chamada de espessura.
O voxel possui um valor médio para o volume representado. Uma reconstrução 3D, é representada por uma sequência de frames 2D, no qual cada frame corresponde a um corte com uma determinada espessura. A partir do modelo 3D pode-se obter novos planos de corte e visualização em ângulos variados.
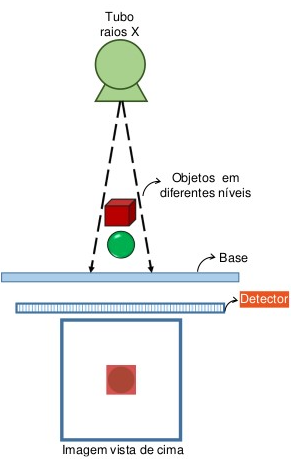
De forma coloquial, podemos dizer que quando um feixe do RAIO-X incide sobre um paciente, o mesmo é atenuado por todos os materiais atravessados. A energia que chega em cada pixel do detector e é medida, corresponde ao valor emitido subtraído da somatória das atenuações de cada porção de material atravessado. Não é possível pela imagem gerada identificar facilmente a sequência de objetos ou a sequência de tecidos atravessada.
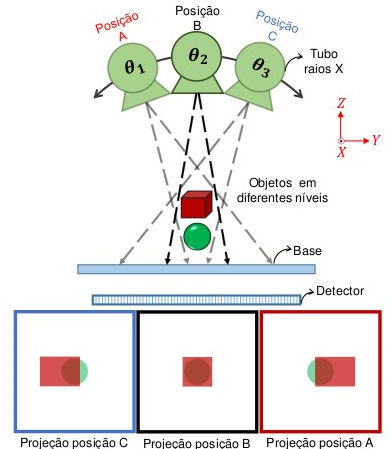
No processo de síntese ou reconstrução do modelo 3D, são utilizadas como entradas um conjunto de imagens 2D adquiridas pelo equipamento. Cada uma das imagens 2D é obtida de uma posição diferente do gerador de forma a obter projeções distintas. Associada a cada imagem se tem a posição no espaço 3D do gerador e do detector.
No processo de síntese ou reconstrução do modelo 3D, são utilizadas como entradas um conjunto de imagens 2D adquiridas pelo equipamento. Cada uma das imagens 2D é obtida de uma posição diferente do gerador de forma a obter projeções distintas. Associada a cada imagem se tem a posição no espaço 3D do gerador e do detector.
O processo de reconstrução corresponde a atribuir a cada voxel do modelo resultante, um valor de atenuação individual, a partir das projeções disponíveis. A partir da posição de origem do raio-X e a posição do detector pode-se estimar a trajetória de cada feixe de raios que estimulou cada pixel do detector.
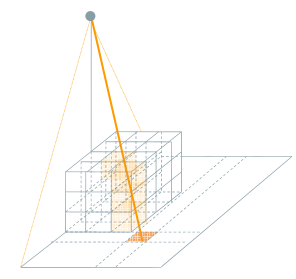
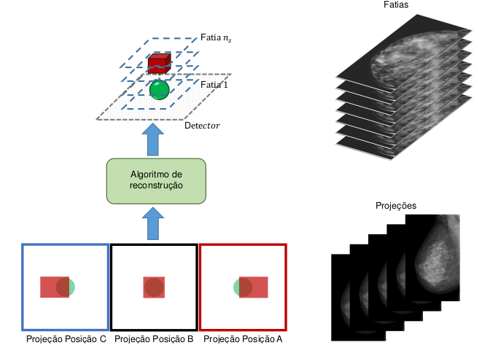
O valor obtido no pixel é resultante da atenuação do material presente nos voxels que cada feixe individual atravessou. Ou seja, se tem a soma da atenuação, mas não se tem o valor individual. Obter os valores para o volume desejado é justamente o processo de reconstrução. A partir das projeções obtidas pelo raio-x se reconstrói para obter as fatias ou cortes desejados do modelo 3D, como acontece em nossos mamógrafos Digimamo.
Conceitualmente, se deseja determinar a atenuação individual de cada voxel a partir de um conjunto de feixes individuais de raio-X. Um feixe individual para cada pixel de cada frame capturado.
Na reconstrução de duas dimensões, exemplificada na próxima figura, existem 4 valores a serem determinados (f1, f2, f3, f4). Utilizando para isso 4 valores de pixel (p1, p2, p3, p4) obtidos de diferentes posicionamentos. O p1 é atenuado por f1 e f3. O valor p2 por f2 e f4. O valor p3 por f1 e f4. E por último, o valor p4 por f1 e f2.
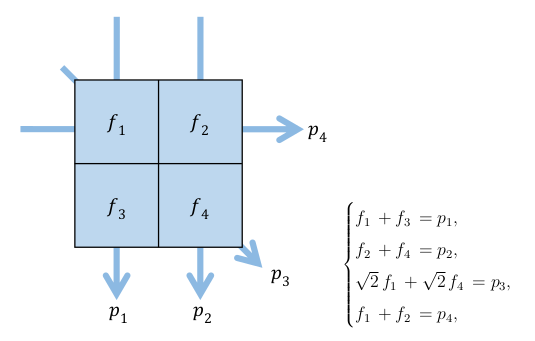
Pode-se gerar um sistema de equações, que resolvido corresponde a reconstrução desejada. A reconstrução 3D é conceitualmente equivalente. No mundo ideal, basta se gerar equações suficientes para permitir a resolução das variáveis. Na prática corresponde a aumentar o número de capturas 2D em posicionamentos diferentes. Infelizmente, como em todo sistema físico real, os valores obtidos possuem erros que podem variar em função do pixel ou em função do frame obtido. Uma função simples como f1 + f3 = p1 passa a ter um componente de erro e1 (f1+f3=p1+e1) de modelagem complexa. A presença dos erros inviabiliza soluções exatas, direcionando assim, os algoritmos de reconstrução da tomossíntese para utilizar métodos interativos.
Os métodos interativos partem de uma solução inicial para o volume a ser reconstruído. Calculam projeções utilizando a geometria na captura de cada frame e comparam com o frame obtido do equipamento. A partir desta comparação, se tem valores de erro a serem aplicados sucessivamente a solução inicial.
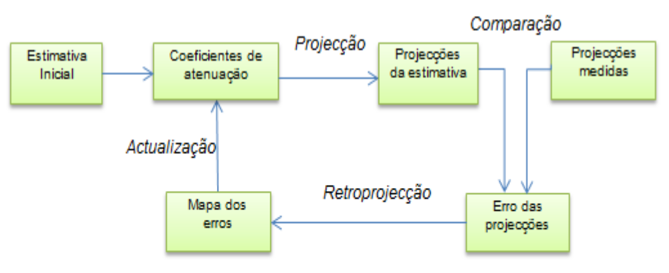
Existem atualmente vários algoritmos para reconstrução. Basicamente utilizam técnicas matemáticas diferentes para realizar a comparação das projeções e para corrigir os erros nos coeficientes de atenuação que correspondem a solução do modelo.
Existem atualmente vários métodos ou algoritmos que solucionam este problema da tomossíntese com características próprias. Seja da qualidade do resultado, seja do tempo e dos recursos computacionais necessários. Deve-se escolher o que melhor se adequa ao equipamento, maximizando a qualidade do resultado. Neste caso, a qualidade do diagnostico a ser realizado. Entre os algoritmos podemos exemplificar os seguintes:
- SIRT – Simultaneous Iterative Reconstruction Technique
- CGLS – Conjugate Gradient Least Squares
- FP – Simple Forward Projection
- BP – BackProjection
Vale a pena ressaltar que todos os algoritmos, embora possuam características especificas, dependem das informações recebidas do processo de captura. Seja a qualidade e precisão de cada imagem obtida pelo raio-x. Seja pela precisão do posicionamento de cada captura. Portanto, a qualidade final da tomossíntese depende principalmente da qualidade e precisão do equipamento utilizado.
Quanto maior o número de capturas, menor vai ser o erro real no resultado final, mas representa também uma maior exposição do paciente a radiação. Outro aspecto é a variação do ângulo de captura que pode realçar características desejáveis para cada exame específico, tais como a espessura ideal dos cortes ou fatias.
Qualidade do equipamento para realização da tomossíntese
Todo processo físico, a captura de imagens e a movimentação de um equipamento estão sujeitos a erros e imprecisões. A qualidade da síntese realizada depende da minimização e controle das fontes de erro durante todo o processo. Por isso a importância do uso de um equipamento de alta precisão, qualidade e reprodutibilidade.
Para realizar a tomossíntese, deve-se realizar primeiro um processo de calibração, no qual se obtenha os parâmetros necessários para a reconstrução. Para que esta calibração continue valida ao longo do tempo, e o resultado da tomossíntese mantenha a qualidade, o equipamento deve ser capaz de repetir cada exame mantendo de forma precisa os seus parâmetros operacionais. Todos os componentes devem ser de alta qualidade e conformidade.
A emissão de raio-X deve ser homogênea de forma a garantir imagens 2D de boa qualidade. Os disparos devem ser precisos no tempo e na posição adequada quando em movimento.
O detector, além de uma grande resolução, deve ter a capacidade de obter múltiplos frames em um curto período de tempo, e deve oferecer uma grande faixa de valores por pixel.
A robótica que controla o movimento para variar a posição do gerador deve ser precisa para proporcionar capturas em posições predefinidas que otimizem a qualidade da tomos síntese.
E todos estes elementos devem operar em perfeito sincronismo para oferecer capturas de imagem 2D nítidas e com posicionamento preciso.
Por: Joseph Átila – Gerente de Projetos VMI Médica
